
Collaborative Robots - Introduction
Collaborative Robots
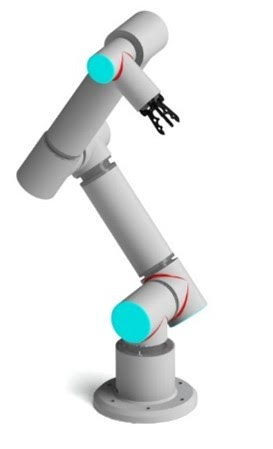
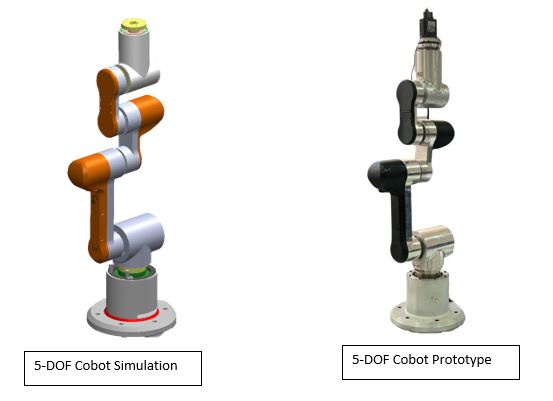
Collaborative robots allow safe physical interaction and synergistically share the workspace with other robots and human co-workers. These robots can be efficiently programmed by means of physical stimuli and percepts without extensive reconfigurability of their hardware or software components. The lab is indigenously developing a 7-DOF collaborative robot for typical industrial applications. Its design has been systematically evolved from the successful realization of its smaller versions: 3-DOF planar writing manipulator followed 5-DOF non-planar manipulator for pick-and-place task. The collaborative feature has been introduced by means of an impedance control scheme as well as exploiting redundancy for added compliance. The final product, a 7-DOF collaborative manipulator is expected to meet the modern needs of the national industry.
 |